Ron and I had a little bit of free time over lunch today, so we got together and continued the work we started at yesterday's meeting. I've fleshed out the code, so the 'bot now:
- Goes to the sensor array
- Takes two readings, one lit and one unlit
- Figures out the color of the candy based on those readings (well, not really -- more on this in a minute)
- Goes to the correct bin (ditto)
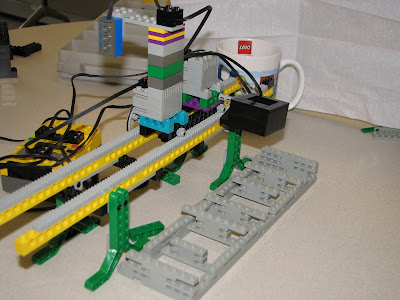
- Turns the bucket one full turn, dumping the candy into the bin and resetting the bucket for the next trip to the to-be-created hopper
- Returns to the starting point
Unfortunately, we've run into a snag. The readings that we get vary widely, even with the same particular piece of candy. The value returned seems to be affected by bucket position (Ron fiddled with that, and we think we have the candy centered right under the sensor now, but we had to add a "bumper" to do it), candy orientation, candy size, and who knows what else.
Naturally, this means the software doesn't work -- it can't tell red from yellow, for instance, and given the extreme variation in readings, it's hard to know how to change the code to compensate. Ron came up with an interesting idea -- putting the sensor at the bottom of the bucket. This would eliminate the size and orientation variables, and make the bucket position moot -- it would just have to be positioned under something that blocks out ambient light.
Sometime next week, or at next week's meeting, we'll need to experiment to see if that would actually work -- information we need before we do a major bucket redesign.