Having spent the past number of weeks hammering out the basic operation and structure our candy-sorting robot would use, it was time to start making that structure look a little more professional.

That essentially meant completely disassembling what we'd cobbled together. We also took the time to study some Technic building techniques, addressing the fear of the team that we didn't have enough "regular" Lego pieces to build what we were doing. (Technic pieces are perhaps less intuitive than "regular" Lego bricks, and only a few of our team members have much experience with Lego, so this was a productive, hands-on time for learning.)
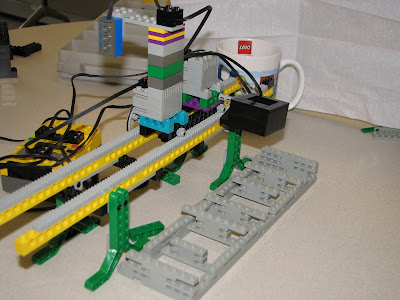
Kimberly's suggestion of "chicken feet" turned out to be very useful in designing a way to raise the platform up to a workable height without adding a lot of unnecessary structure. It's fascinating to see our really, really rough mess starting to look very professional, but that's exactly what one would expect with iterative development.
By the end of next week's meeting, we should have the finalized sensor platform and position-tracking sensor (which will read a series of contrasting-color tiles to determine location) in place, and will then need to decide between starting the color-sorting programming, or coming up with the feeder mechanism. We haven't done any of the programming yet, so that might make the most sense. We shall see what the team decides.

No comments:
Post a Comment